Content #
-
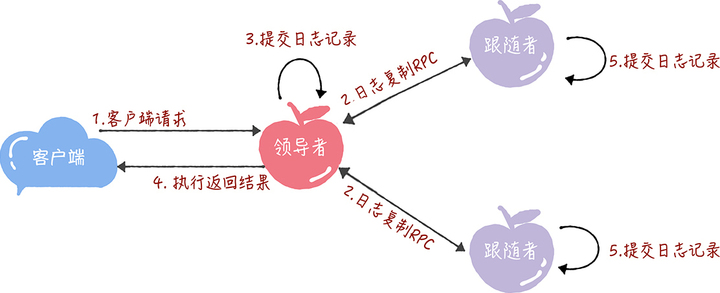
接收到客户端请求后,领导者基于客户端请求中的指令,创建一个新日志项,并附加到本地日志中。
-
领导者通过日志复制 RPC,将新的日志项复制到其他的服务器。
-
当领导者将日志项,成功复制到大多数的服务器上的时候,领导者会将这条日志项应用到它的状态机中。
-
领导者将执行的结果返回给客户端。
-
当跟随者接收到心跳信息,或者新的日志复制 RPC 消息后,如果跟随者发现领导者已经提交了某条日志项,而它还没应用,那么跟随者就将这条日志项应用到本地的状态机中。
 September 28, 2022
September 28, 2022
September 28, 2022
September 28, 2022
你可以把 Raft 的日志复制理解成一个优化后的二阶段提交(将二阶段优化成了一阶段),减少了一半的往返消息,也就是降低了一半的消息延迟。那日志复制的具体过程是什么呢?
首先,领导者进入第一阶段,通过日志复制(AppendEntries)RPC 消息,将日志项复制到集群其他节点上。
接着,如果领导者接收到大多数的“复制成功”响应后,它将日志项应用到它的状态机,并返回成功给客户端。如果领导者没有接收到大多数的“复制成功”响应,那么就返回错误给客户端。
学到这里,有同学可能有这样的疑问了,领导者将日志项应用到它的状态机,怎么没通知跟随者应用日志项呢?
这是 Raft 中的一个优化,领导者不直接发送消息通知其他节点应用指定日志项。因为领导者的日志复制 RPC 消息或心跳消息,包含了当前最大的,将会被提交(Commit)的日志项索引值。所以通过日志复制 RPC 消息或心跳消息,跟随者就可以知道领导者的日志提交位置信息。
因此,当其他节点接受领导者的心跳消息,或者新的日志复制 RPC 消息后,就会将这条日志项应用到它的状态机。而这个优化,降低了处理客户端请求的延迟,将二阶段提交优化为了一段提交,降低了一半的消息延迟。
September 28, 2022
副本数据是以日志的形式存在的,日志是由日志项组成,日志项究竟是什么样子呢?
其实,日志项是一种数据格式,它主要包含用户指定的数据,也就是指令(Command),还包含一些附加信息,比如索引值(Log index)、任期编号(Term)。那你该怎么理解这些信息呢?
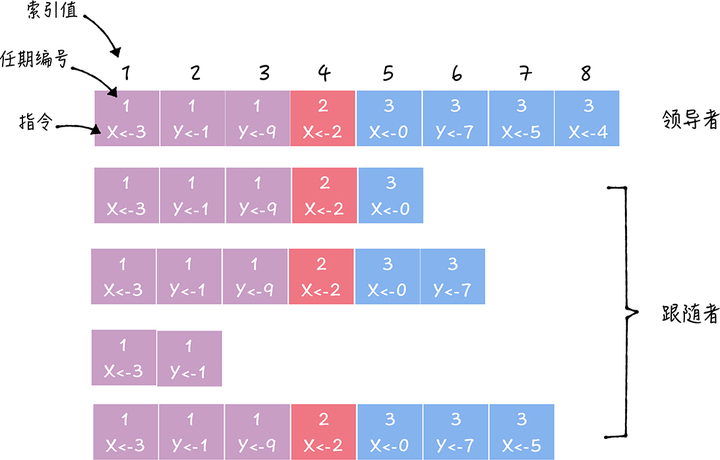
指令:一条由客户端请求指定的、状态机需要执行的指令。你可以将指令理解成客户端指定的数据。
索引值:日志项对应的整数索引值。它其实就是用来标识日志项的,是一个连续的、单调递增的整数号码。
任期编号:创建这条日志项的领导者的任期编号。
从图中你可以看到,一届领导者任期,往往有多条日志项。而且日志项的索引值是连续的,这一点你需要注意。
September 28, 2022
September 28, 2022
议会选举中的领导者是有任期的,领导者任命到期后,要重新开会再次选举。 Raft 算法中的领导者也是有任期的,每个任期由单调递增的数字(任期编号)标识,比如节点 A 的任期编号是 1。任期编号是随着选举的举行而变化的,这是在说下面几点。
跟随者在等待领导者心跳信息超时后,推举自己为候选人时,会增加自己的任期号,比如节点 A 的当前任期编号为 0,那么在推举自己为候选人时,会将自己的任期编号增加为 1。
如果一个服务器节点,发现自己的任期编号比其他节点小,那么它会更新自己的编号到较大的编号值。比如节点 B 的任期编号是 0,当收到来自节点 A 的请求投票 RPC 消息时,因为消息中包含了节点 A 的任期编号,且编号为 1,那么节点 B 将把自己的任期编号更新为 1。
与现实议会选举中的领导者的任期不同,Raft 算法中的任期不只是时间段,而且任期编号的大小,会影响领导者选举和请求的处理。
在 Raft 算法中约定,如果一个候选人或者领导者,发现自己的任期编号比其他节点小,那么它会立即恢复成跟随者状态。比如分区错误恢复后,任期编号为 3 的领导者节点 B,收到来自新领导者的,包含任期编号为 4 的心跳消息,那么节点 B 将立即恢复成跟随者状态。
还约定如果一个节点接收到一个包含较小的任期编号值的请求,那么它会直接拒绝这个请求。比如节点 C 的任期编号为 4,收到包含任期编号为 3 的请求投票 RPC 消息,那么它将拒绝这个消息。
September 28, 2022
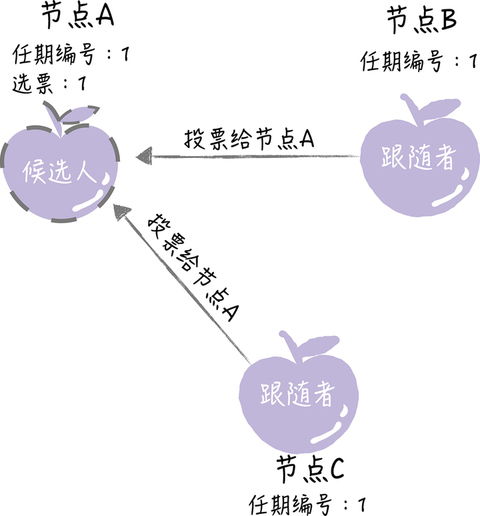
那么这三个成员是怎么选出来领导者的呢?为了方便你理解,我以图例的形式演示一个典型的领导者选举过程。
首先,在初始状态下,集群中所有的节点都是跟随者的状态。
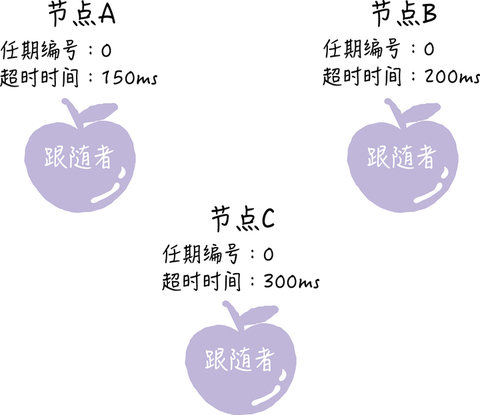
Raft 算法实现了随机超时时间的特性。也就是说,每个节点等待领导者节点心跳信息的超时时间间隔是随机的。通过上面的图片你可以看到,集群中没有领导者,而节点 A 的等待超时时间最小(150ms),它会最先因为没有等到领导者的心跳信息,发生超时。
这个时候,节点 A 就增加自己的任期编号,并推举自己为候选人,先给自己投上一张选票,然后向其他节点发送请求投票 RPC 消息,请它们选举自己为领导者。
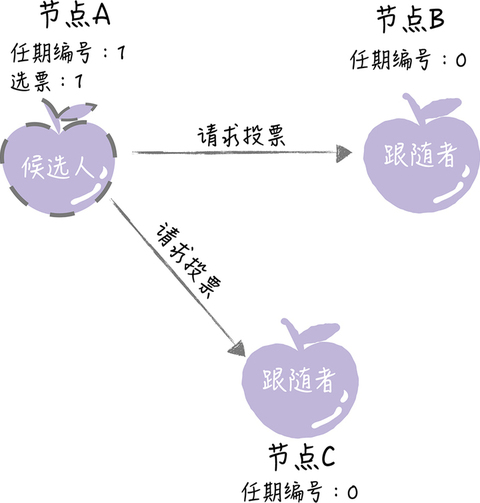
如果其他节点接收到候选人 A 的请求投票 RPC 消息,在编号为 1 的这届任期内,也还没有进行过投票,那么它将把选票投给节点 A,并增加自己的任期编号。
如果候选人在选举超时时间内赢得了大多数的选票,那么它就会成为本届任期内新的领导者。
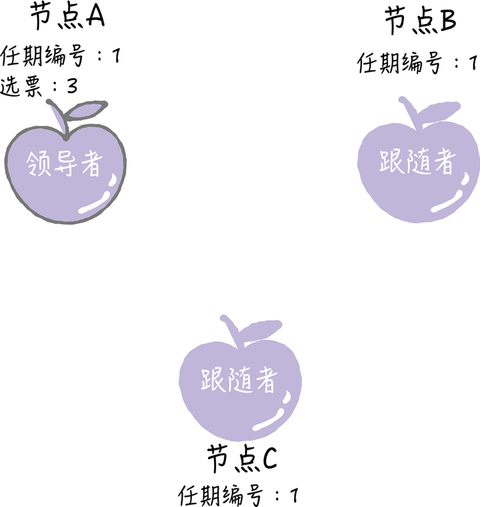
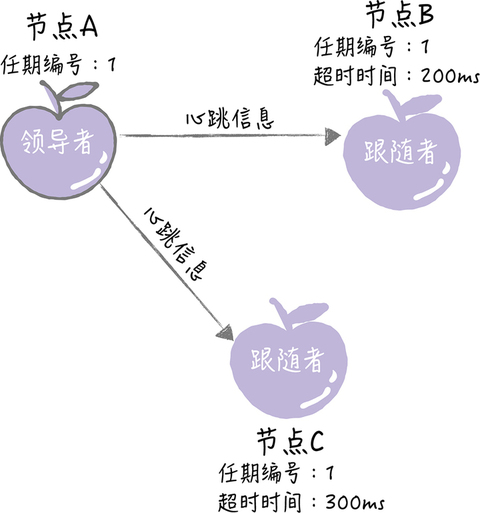
节点 A 当选领导者后,他将周期性地发送心跳消息,通知其他服务器我是领导者,阻止跟随者发起新的选举,篡权。
 September 28, 2022
September 27, 2022
September 28, 2022
September 27, 2022
直接通过多次执行 Basic Paxos 实例,来实现一系列值的共识,就会存在这样几个问题:
如果多个提议者同时提交提案,可能出现因为提案编号冲突,在准备阶段没有提议者接收到大多数准备响应,协商失败,需要重新协商。你想象一下,一个 5 节点的集群,如果 3 个节点作为提议者同时提案,就可能发生因为没有提议者接收大多数响应(比如 1 个提议者接收到 1 个准备响应,另外 2 个提议者分别接收到 2 个准备响应)而准备失败,需要重新协商。
2 轮 RPC 通讯(准备阶段和接受阶段)往返消息多、耗性能、延迟大。你要知道,分布式系统的运行是建立在 RPC 通讯的基础之上的,因此,延迟一直是分布式系统的痛点,是需要我们在开发分布式系统时认真考虑和优化的。
解决方案:
September 27, 2022
September 27, 2022
在 Basic Paxos 中,兰伯特也使用提案代表一个提议。不过在提案中,除了提案编号,还包含了提议值。为了方便演示,我使用[n, v]表示一个提案,其中 n 为提案编号,v 为提议值。
我想强调一下,整个共识协商是分 2 个阶段进行的。那么具体要如何协商呢?
我们假设客户端 1 的提案编号为 1,客户端 2 的提案编号为 5,并假设节点 A、 B 先收到来自客户端 1 的准备请求,节点 C 先收到来自客户端 2 的准备请求。
首先客户端 1、2 作为提议者,分别向所有接受者发送包含提案编号的准备请求:
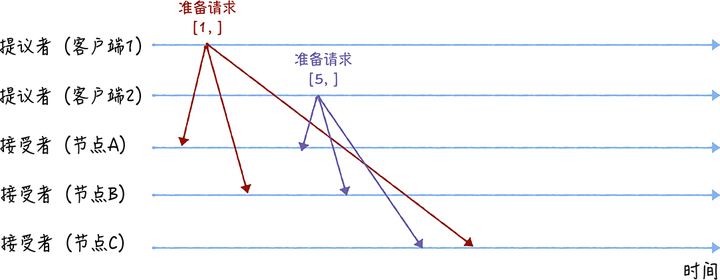
你要注意,在准备请求中是不需要指定提议的值的,只需要携带提案编号就可以了。
接着,当节点 A、B 收到提案编号为 1 的准备请求,节点 C 收到提案编号为 5 的准备请求后,将进行这样的处理:
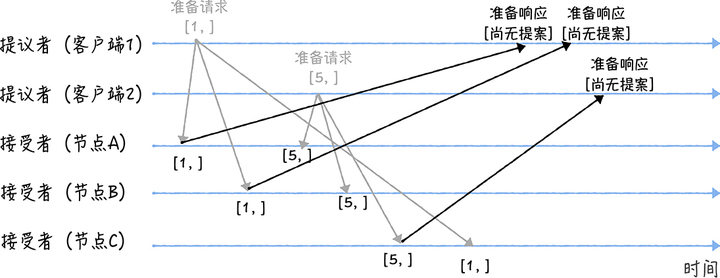
由于之前没有通过任何提案,所以节点 A、B 将返回一个 “尚无提案”的响应。也就是说节点 A 和 B 在告诉提议者,我之前没有通过任何提案呢,并承诺以后不再响应提案编号小于等于 1 的准备请求,不会通过编号小于 1 的提案。
节点 C 也是如此,它将返回一个 “尚无提案”的响应,并承诺以后不再响应提案编号小于等于 5 的准备请求,不会通过编号小于 5 的提案。
另外,当节点 A、B 收到提案编号为 5 的准备请求,和节点 C 收到提案编号为 1 的准备请求的时候,将进行这样的处理过程:
...